Robotik
İnsanları İzleyerek Öğrenen Robotları Sağlayan Öğrenme Yöntemi
Carnegie Mellon Üniversitesi (CMU) araştırmacıları tarafından geliştirilen yeni bir öğrenme yöntemi, robotların insan etkileşimi videolarından直接 öğrenmesini ve bilgileri yeni görevlere genelleştirmesini sağlar, bu da onlara ev işlerini nasıl yapacaklarını öğretmeye yardımcı olur. Öğrenme yöntemi WHIRL olarak adlandırılır ve İnsan Taklit Eden Robot Öğrenimi anlamına gelir ve robotun görevleri gözlemlemesine ve video verilerini toplamasına yardımcı olarak sonunda işi kendisi nasıl tamamlayacağını öğrenmesini sağlar.
Araştırma, New York’ta düzenlenen Robotics: Science and Systems konferansında sunuldu.
Öğrenmenin Bir Yolu Olarak Taklit
Shikhar Bahl, Carnegie Mellon Üniversitesi Bilgisayar Bilimi Okulu’nun Robotik Enstitüsü’nde (RI) doktora öğrencisidir.
“Taklit öğrenmenin harika bir yolu,” dedi Bahl. “Robotların doğrudan insanları izleyerek öğrenmesi, alanındaki çözülmemiş bir sorun olarak kalıyor, ancak bu çalışma bu yeteneği mümkün kılmada önemli bir adım atıyor.”
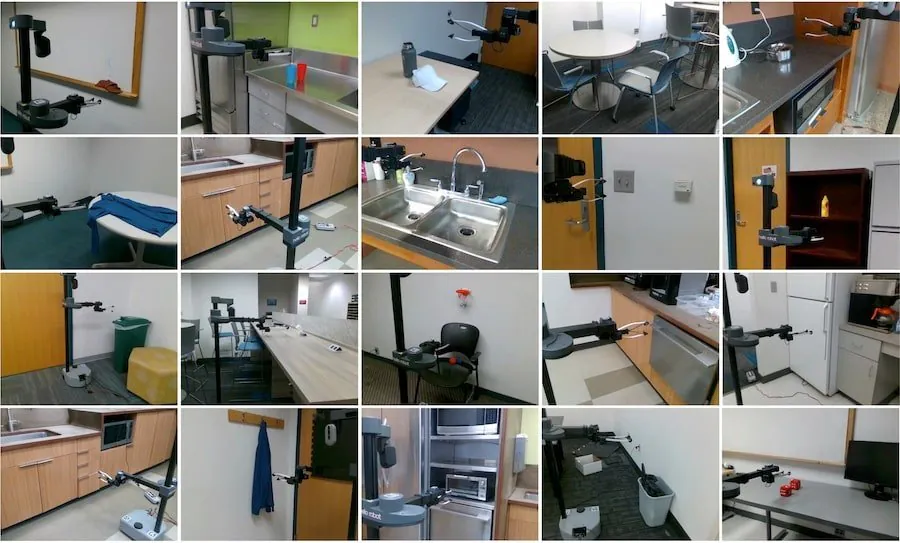
Bahl, RI’de öğretim üyeleri olan Deepak Pathak ve Abhinav Gupta ile birlikte çalıştı. Ekibin bir kamera ve yazılımlarını eklediği bir robot, 20’den fazla görevi tamamlamayı öğrendi. Bu görevler, cihazları açıp kapamadan çöp torbasını çöp kutusundan çıkarmaya kadar her şeyi içeriyordu. Her defasında robot, görevi kendisi denemeden önce bir insan tarafından görevi tamamlanmasını izledi.
Pathak, RI’de yardımcı profesör.
“Bu çalışma, robotları eve getirmenin bir yolunu sunuyor,” dedi Pathak. “Robotların başarılı bir şekilde farklı görevleri tamamlamaları için programlanmayı veya eğitilmeyi beklemek yerine, bu teknolojiyi kullanarak robotları eve dağıtabiliyor ve görevleri tamamlamayı izleyerek öğrenmelerine ve çevrelerine uyum sağlamalarına olanak tanıyoruz.”
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL ve Mevcut Yöntemler
Robotları bir görevi öğretmek için kullanılan mevcut yöntemlerin çoğu taklit veya pekiştirme öğrenimine dayanır. Taklit öğrenmede, insanlar bir robota manuel olarak çalıştırır ve görevi tamamlamayı öğretir, bu da görevin birden fazla kez tekrarlanmasını gerektirir. Pekiştirme öğrenmede, robot genellikle gerçek dünyaya uyum sağlamak için milyonlarca örnek üzerinde simülasyonda eğitilir.
Her iki model de, yapılandırılmış bir ortamda bir robota tek bir görev öğretmede verimlidir, ancak bunları ölçeklendirme ve dağıtma zorlukları vardır. Ancak WHIRL ile bir robot, bir insan tarafından görevin tamamlanmasının videosundan öğrenebilir. Ayrıca kolayca ölçeklenebilir, belirli bir görevle sınırlı değildir ve ev ortamlarında çalışabilir.
WHIRL, robotların doğal ortamlarında görevleri tamamlamalarını sağlar. İlk birkaç deneme genellikle başarısızlıkla sonuçlansa da, birkaç başarının ardından çok hızlı bir şekilde öğrenebilir. Robot, görevi her zaman aynı hareketlerle tamamlamaz, çünkü farklı parçaları farklı şekilde hareket eder. Ancak görevi tamamlamanın sonu her zaman aynıdır.
“Robotikleri vahşi ortamlarda ölçeklemek için, veriler güvenilir ve kararlı olmalıdır ve robotlar kendi ortamlarında uygulamalar yaparak daha iyi hale gelmelidir,” dedi Pathak.
