
Robotics
Kecoa Sareng Alat Panyungsi sareng Nyalametkeun Diaktipkeun AI
Panaliti robotika internasional parantos ngembangkeun sistem Pencarian sareng Nyalametkeun Perkotaan (USAR) anu ngagunakeun kecoa hirup anu 'bisa dialihkeun' pikeun ngangkut sistem deteksi survivor infra red anu diaktipkeun dina mesin miniaturisasi ngaliwatan skénario bencana anu henteu tiasa dilayari.
nu sistim mangrupa kolaborasi antara departemén panalungtikan di Singapura, Cina, Jérman jeung Inggris. Éta ngagunakeun kecoak Madagaskar salaku kandaraan, sarta ngabogaan kakuatan cukup pikeun ngajalankeun sababaraha jam.
Sumber: https://arxiv.org/abs/2105.10869
Sistem nyalametkeun hibrida gaduh modél pembelajaran mesin pikeun deteksi manusa anu dilatih dina gambar infra red (IR), sareng ngawasa sistem deteksi IR mobile, anu tiasa beroperasi sacara mandiri upami diperyogikeun, ngalaporkeun anu salamet deui ka pangkalan operasi.
Sumberdaya Lokal kawates
Kerangka pembelajaran mesin diperlukeun pikeun beroperasi dina sumberdaya extraordinarily langsing: ngan 191.8kB RAM statik jeung 1988kB memori Flash ditinggalkeun pikeun sistem tina sarat kakuatan umum pikeun alat, nu ogé kudu nyadiakeun stimulus listrik pikeun serangga.

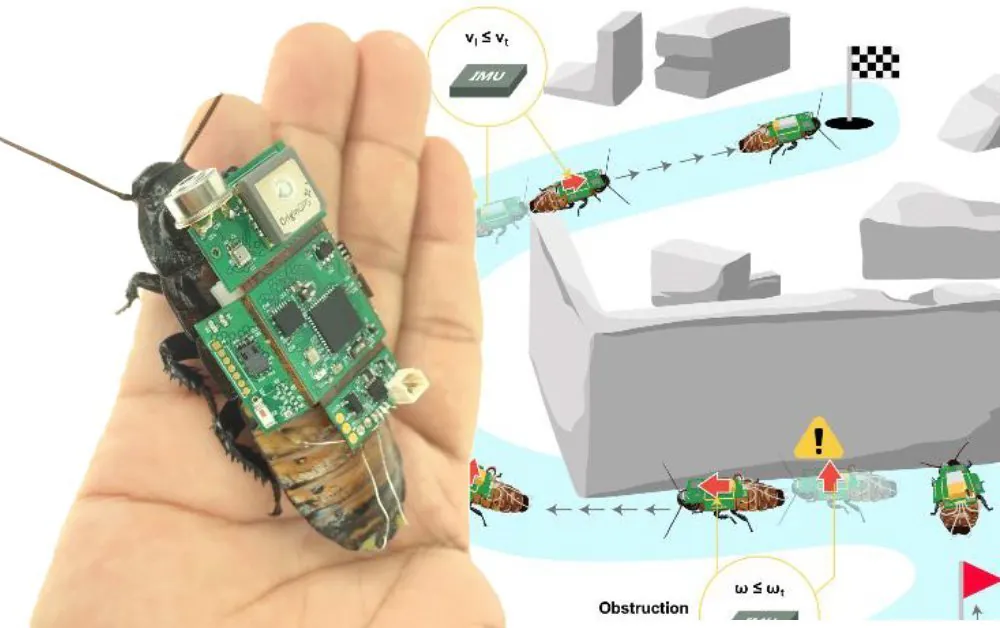
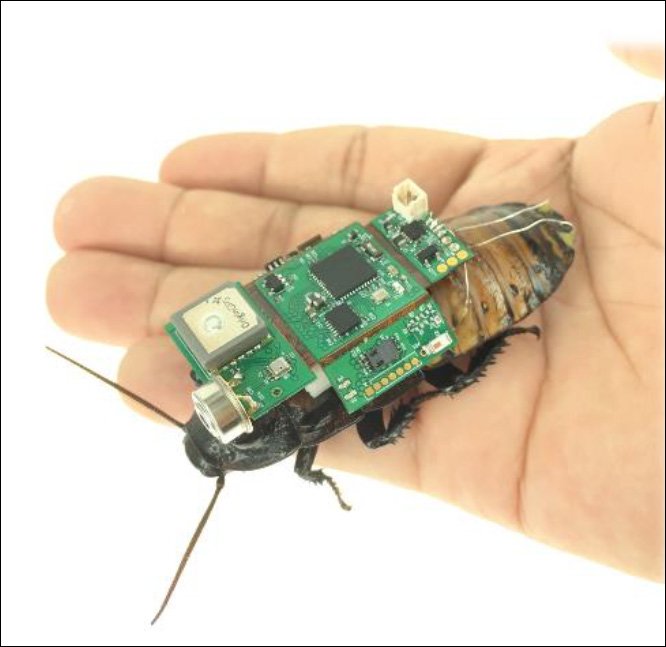
Tilu blok fungsional ransel kecoa, gambar di luhur, kalebet stimulasi nirkabel, unit pangontrol primér sareng komponén periferal, kalayan sistem pembelajaran mesin turunan IR sareng fungsionalitas navigasi dipasang kana unit pangontrol primér. sirkuit rig urang geus dibeulah jadi sababaraha komponén guna hadé nyocogkeun géométri cockroach nu.
Kecoak Madagaskar (diantarana spésiés pangbadagna di dunya, kalawan kapasitas beban maksimum 15g) dikawasa ku guncangan listrik leutik nu steering eta dina hiji arah atawa sejen, dilaksanakeun ku opat éléktroda implanted kana anteneu mahluk urang (deukeut), jeung kana beuteungna. Éléktroda diamankeun ku lilin lebah.
Nambahkeun AI Pikeun Milarian Serangga Sareng Nyalametkeun
Inisiatif anyar mekarkeun karya sateuacana ti UC Berkeley sareng Universitas Teknologi Nanyang Singapura, anu munggaran didamel tina ngagunakeun kumbang steerable dina skenario USAR.

Panalungtikan 2016 kana ngadalikeun jalur hiber kumbang. Sumber: https://www.youtube.com/watch?v=iljHXpE4LG8
Sanaos kumbang gaduh kamampuan penerbangan tambihan, kapasitas bebanna teras-terasan dikirangan, nurunkeun kamampuan poténsial téknologi onboard, sareng nyababkeun paménta konsumsi daya ka tingkat kritis, khususna dina kasus dimana perlu ngajalankeun algoritma pembelajaran mesin.
Sistem pangakuan manusa otonom onboard dina prakarsa anyar ngagunakeun modél klasifikasi gambar ngamangpaatkeun ngarojong mesin vektor (SVM) jeung Histogram of Gradién Berorientasi.
Gerak kecoa diarahkeun ku sistem navigasi terpadu, sareng nungtun 'biobot' ka tujuan anu tos ditangtukeun tanpa aya pangaweruh ngeunaan halangan-halangan anu aya. Sabagéan ageung, kaahlian navigasi anu luar biasa cockroach ngarengsekeun seueur masalah dina dugi ka lokasi anu henteu tiasa dihontal.

Sumber: https://arxiv.org/abs/2105.10869
Sistem infra red onboard ngarebut gambar dina 1hz, operasi suksés di wewengkon poék, sarta sacara nirkabel ngalaporkeun sagala salamet lokasina ka puseur komando sacara real waktu. Pikeun ngahémat énergi, sistem analisa gambar ngan ukur ngamimitian operasi upami dipicu ku bacaan infra red positif.
Modél ieu ngeusian ngan ukur 18.3kB mémori Flash sareng 52.2kB RAM statik, ngahontal waktos komputasi 95 milliseconds. Waktos pamrosésan anu wajar penting dina skenario USAR, sabab tanda tangan infra red anu jauh tiasa dileungitkeun dina interval pamrosésan nalika kecoa ngarobih arah sareng ngalangkungan rupa bumi.
Sistem ieu ogé gaduh sensor pikeun ngawas suhu, kalembaban sareng CO2, pikeun ngalaporkeun kaayaan lokal pikeun usaha nyalametkeun, sareng ngamungkinkeun pusat kontrol ngajauhan mahluk tina kaayaan naon waé anu bakal ngabahayakeun.
Nguji Dina Terrains Simulated
Sistim ieu diuji dina skenario musibah simulated (gambar di luhur), kalawan rundingan halangan éféktif, iwal dina konfigurasi tangtu utamana nangtang ngalibetkeun climbs vertiginous, saprak Cucunguk aya dina disadvantage beurat alatan parabot napel.

Arsitéktur navigasi mimitina boga kacenderungan pikeun nyangkut dina halangan overwhelming, kayaning kaayaan dimana malah kecoak teu bisa neruskeun salajengna, sarta peneliti salajengna ngembangkeun sistem navigasi eupan balik prediktif pikeun ngaronjatkeun kinerja dina nyanghareupan halangan jangkung. Sistem éta tiasa ngahontal tingkat kasuksésan 100% dina lingkungan anu henteu aya halangan atanapi rendah, sareng tingkat kasuksésan anu langkung luhur kalayan halangan anu jangkung.
Dimana gagalna lumangsung, panalungtik nyimpulkeun yén ieu bisa dirémediasi ku cara ningkatkeun durasi percobaan, sanajan ieu logis boga implikasi dina skenario USAR kritis waktos.
Témbongkeun Infrabeureum
Kaméra infra red onboard boga spésifikasi modest, operasi di 32 × 32 piksel kalawan widang 90-derajat of view. Gambar, nalika dipicu, dialirkeun saringan denoising median.
Sistemna ngahontal tingkat kasuksésan 87% dina ngabédakeun subjek manusa tina jinis tanda tangan termal anu sanés, naék ka 90% nalika dina radius jarakna 0.5m sareng 1.5m.
Kusabab keterbatasan énergi sareng ukuran chip, panilitian awal henteu gaduh sistem lokalisasi onboard, sahingga henteu mungkin pikeun ngalacak posisi kecoa sacara real waktos. Para panalungtik nyarankeun yén itungan maot bisa dilaksanakeun salaku solusi hemat daya, kalayan sinyal lokasi low-énergi relayed deui ka puseur kontrol, dina palaksanaan hareup.
Serangga Salaku Operator Search Jeung Nyalametkeun
Sapuluh taun ka pengker parantos nyayogikeun proyék-proyék panilitian pikeun ngagunakeun daya tahan sareng kakuatan navigasi serangga pikeun nyiptakeun sistem robotic hibrid atanapi murni pikeun skenario milarian sareng nyalametkeun. Di sagigireun karya nu patali kumbang 2016 nu miheulaan inisiatif panganyarna ieu, aya sababaraha usaha pikeun nyieun deui kamampuhan insectoid dina formulir murni robotic.
Ieu kaasup a proyék panalungtikan 2019 ti UoC nu nawarkeun hiji robot ergonomically basajan dumasar kana prinsip Cucunguk, salah sahiji proyék munggaran nanaon na pikeun alamat fragility ekstrim serangga robotics.















