
ຫຸ່ນຍົນ
ແມງສາບທີ່ມີ AI-enabled ຄົ້ນຫາແລະອຸປະກອນກູ້ໄພ
ນັກຄົ້ນຄວ້າຫຸ່ນຍົນສາກົນໄດ້ພັດທະນາລະບົບຄົ້ນຫາ Urban Search And Rescue (USAR) ທີ່ໃຊ້ແມງສາບທີ່ມີຊີວິດ 'steerable' ເພື່ອຂົນສົ່ງລະບົບກວດຈັບຜູ້ລອດຊີວິດດ້ວຍອິນຟາເລດຂະໜາດນ້ອຍທີ່ໃຊ້ການຮຽນຮູ້ເຄື່ອງຈັກຜ່ານສະຖານະການໄພພິບັດທີ່ບໍ່ສາມາດນໍາທາງໄດ້.
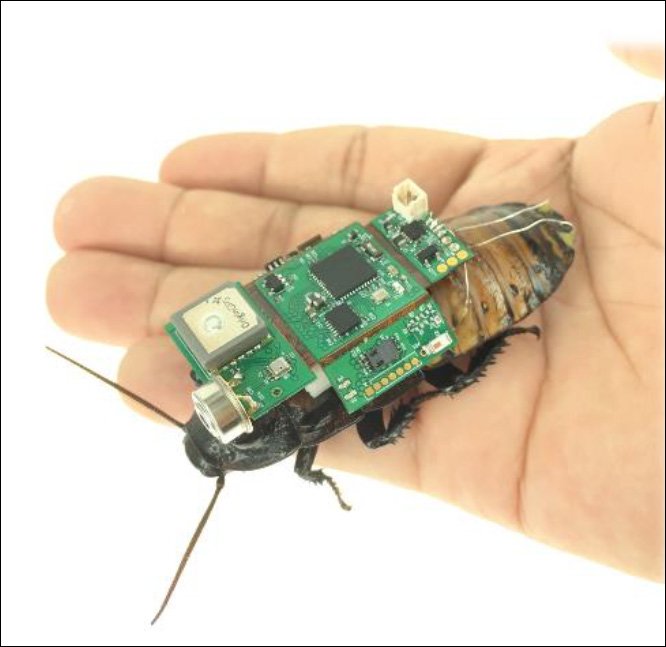
ໄດ້ ລະບົບ ແມ່ນການຮ່ວມມືລະຫວ່າງພະແນກການຄົ້ນຄວ້າໃນສິງກະໂປ, ຈີນ, ເຢຍລະມັນແລະອັງກິດ. ມັນໃຊ້ ແມງສາບ Madagascar ເປັນຍານພາຫະນະ, ແລະມີພະລັງງານພຽງພໍທີ່ຈະແລ່ນເປັນເວລາຫຼາຍຊົ່ວໂມງ.
ທີ່ມາ: https://arxiv.org/abs/2105.10869
ລະບົບການກູ້ໄພແບບປະສົມມີຮູບແບບການຮຽນຮູ້ເຄື່ອງຈັກສໍາລັບການກວດຫາມະນຸດທີ່ໄດ້ຮັບການຝຶກອົບຮົມຈາກຮູບພາບ infrared (IR), ແລະພະລັງງານຂອງລະບົບກວດຈັບ IR ມືຖື, ເຊິ່ງສາມາດດໍາເນີນການອັດຕະໂນມັດຕາມຄວາມຈໍາເປັນ, ລາຍງານຜູ້ລອດຊີວິດທີ່ພົບເຫັນກັບຄືນສູ່ສະຖານີປະຕິບັດງານພື້ນຖານ.
ຊັບພະຍາກອນທ້ອງຖິ່ນທີ່ຈໍາກັດ
ໂຄງສ້າງການຮຽນຮູ້ຂອງເຄື່ອງຈັກແມ່ນຈໍາເປັນເພື່ອດໍາເນີນການກັບຊັບພະຍາກອນທີ່ອ່ອນໂຍນພິເສດ: ພຽງແຕ່ 191.8kB ຂອງ RAM static ແລະ 1988kB ຂອງຫນ່ວຍຄວາມຈໍາ Flash ໄດ້ຖືກປະໄວ້ສໍາລັບລະບົບຈາກຄວາມຕ້ອງການພະລັງງານທົ່ວໄປສໍາລັບອຸປະກອນ, ເຊິ່ງຍັງຕ້ອງສະຫນອງການກະຕຸ້ນໄຟຟ້າສໍາລັບແມງໄມ້.

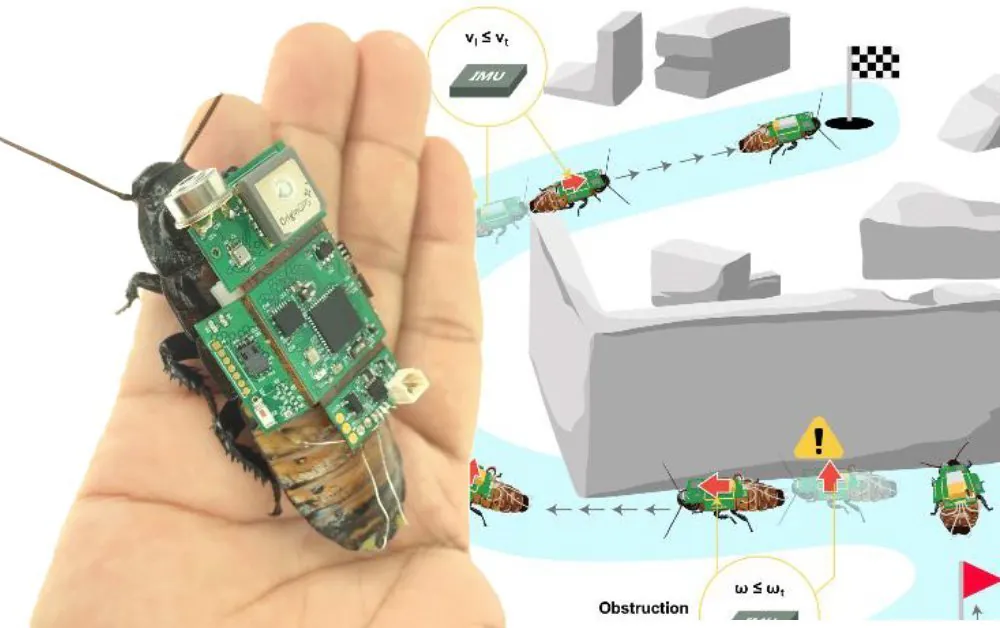
ສາມສິ່ງທີ່ເປັນປະໂຫຍດຂອງກະເປົ໋າຂອງແມງສາບ, ຕາມຮູບຂ້າງເທິງ, ປະກອບມີການກະຕຸ້ນແບບໄຮ້ສາຍ, ໜ່ວຍຄວບຄຸມຫຼັກ ແລະ ອົງປະກອບຂອງອຸປະກອນຕໍ່ພ່ວງ, ດ້ວຍລະບົບການຮຽນຮູ້ເຄື່ອງທີ່ມາຈາກ IR ແລະ ໜ້າທີ່ນຳທາງທີ່ຝັງຢູ່ໃນໜ່ວຍຄວບຄຸມຫຼັກ. ວົງຈອນຂອງເຄື່ອງເຈາະໄດ້ຖືກແບ່ງອອກເປັນຫຼາຍອົງປະກອບເພື່ອໃຫ້ເຫມາະກັບເລຂາຄະນິດຂອງແມງສາບ.
ແມງສາບ Madagascar (ໃນບັນດາ ຊະນິດທີ່ໃຫຍ່ທີ່ສຸດ ໃນໂລກ, ມີຄວາມສາມາດໃນການໂຫຼດສູງສຸດຂອງ 15g) ໄດ້ຖືກຄວບຄຸມໂດຍການຊ໊ອກໄຟຟ້າຂະຫນາດນ້ອຍທີ່ຊີ້ນໍາມັນໃນທິດທາງຫນຶ່ງຫຼືອື່ນ, ປະຕິບັດໂດຍສີ່ electrodes implanted ເຂົ້າໄປໃນເສົາອາກາດຂອງ creatures (ເຊີເກີ), ແລະເຂົ້າໄປໃນທ້ອງຂອງມັນ. electrodes ແມ່ນ secured ກັບ beeswax.
ເພີ່ມ AI ເຂົ້າໃນການຄົ້ນຫາແລະກູ້ໄພແມງໄມ້
ຂໍ້ລິເລີ່ມໃໝ່ນີ້ພັດທະນາວຽກງານກ່ອນໜ້ານີ້ຈາກ UC Berkeley ແລະມະຫາວິທະຍາໄລເຕັກໂນໂລຊີ Nanyang ຂອງສິງກະໂປ, ເຊິ່ງເປັນຄັ້ງທຳອິດ. ການນໍາໃຊ້ແມງການຊີ້ນໍາ ໃນສະຖານະການຂອງ USAR.

ປີ 2016 ການຄົ້ນຄວ້າຄວບຄຸມເສັ້ນທາງການບິນຂອງແມງ. ທີ່ມາ: https://www.youtube.com/watch?v=iljHXpE4LG8
ເຖິງແມ່ນວ່າແມງມີຄວາມສາມາດໃນການບິນເພີ່ມຂຶ້ນ, ຄວາມສາມາດໃນການໂຫຼດຂອງພວກມັນໄດ້ຖືກຫຼຸດລົງ, ຫຼຸດລົງຄວາມສາມາດຂອງເຕັກໂນໂລຢີເທິງເຮືອ, ແລະເຮັດໃຫ້ຄວາມຕ້ອງການການບໍລິໂພກພະລັງງານໃນລະດັບທີ່ສໍາຄັນ, ໂດຍສະເພາະໃນກໍລະນີທີ່ມັນຈໍາເປັນຕ້ອງດໍາເນີນການ algorithm ການຮຽນຮູ້ເຄື່ອງຈັກ.
ລະບົບການຮັບຮູ້ຂອງມະນຸດແບບເອກະລາດເທິງເຮືອໃນການລິເລີ່ມໃຫມ່ໃຊ້ຮູບແບບການຈັດປະເພດຮູບພາບໂດຍນໍາໃຊ້. ສະຫນັບສະຫນູນເຄື່ອງ vector (SVM) ແລະ Histogram ຂອງ Oriented Gradients.
ການເຄື່ອນໄຫວຂອງແມງສາບແມ່ນມຸ້ງໂດຍລະບົບນໍາທາງປະສົມປະສານ, ແລະນໍາພາ 'biobot' ໄປສູ່ຈຸດຫມາຍປາຍທາງທີ່ກໍານົດໄວ້ໂດຍບໍ່ຮູ້ຕົວກ່ຽວກັບອຸປະສັກໃດໆ. ສໍາລັບສ່ວນໃຫຍ່, ທັກສະການນໍາທາງທີ່ເປັນຕາຢ້ານຂອງຕົນເອງຂອງແມງສາບແກ້ໄຂບັນຫາສ່ວນໃຫຍ່ໃນການມາຮອດສະຖານທີ່ທີ່ບໍ່ສາມາດເຂົ້າຫາໄດ້.

ທີ່ມາ: https://arxiv.org/abs/2105.10869
ລະບົບອິນຟາເລດເທິງເຮືອຈະຈັບພາບຢູ່ທີ່ 1hz, ປະຕິບັດການຢ່າງສຳເລັດຜົນໃນພື້ນທີ່ມືດ, ແລະລາຍງານຜູ້ລອດຊີວິດໃດໆກໍຕາມທີ່ຕັ້ງຢູ່ໃນສູນບັນຊາການແບບໄຮ້ສາຍໃນເວລາຈິງ. ເພື່ອປະຢັດພະລັງງານ, ລະບົບການວິເຄາະຮູບພາບຈະເລີ່ມປະຕິບັດການພຽງແຕ່ຖ້າຖືກກະຕຸ້ນໂດຍການອ່ານອິນຟາເລດໃນທາງບວກ.
ຮູບແບບດັ່ງກ່າວຄອບຄອງພຽງແຕ່ 18.3kB ຂອງຫນ່ວຍຄວາມຈໍາ Flash ແລະ 52.2kB ຂອງ RAM ຄົງທີ່, ບັນລຸເວລາການຄິດໄລ່ຂອງ 95 ມິນລິວິນາທີ. ເວລາປະມວນຜົນທີ່ສົມເຫດສົມຜົນແມ່ນມີຄວາມຈໍາເປັນໃນສະຖານະການຂອງ USAR, ເນື່ອງຈາກວ່າລາຍເຊັນອິນຟາເຣດທີ່ຢູ່ໄກອາດຈະຖືກພາດໃນໄລຍະການປຸງແຕ່ງຍ້ອນວ່າແມງສາບປ່ຽນທິດທາງແລະຜ່ານທາງພູມສັນຖານ.
ລະບົບຍັງມີເຊັນເຊີເພື່ອຕິດຕາມອຸນຫະພູມ, ຄວາມຊຸ່ມຊື່ນແລະ CO2, ເພື່ອລາຍງານສະພາບທ້ອງຖິ່ນສໍາລັບຄວາມພະຍາຍາມກູ້ໄພທີ່ເປັນໄປໄດ້, ແລະເພື່ອໃຫ້ສູນຄວບຄຸມສາມາດຊີ້ນໍາສັດອອກຈາກສະຖານະການທີ່ເປັນອັນຕະລາຍ.
ການທົດສອບໃນພູມສັນຖານຈໍາລອງ
ລະບົບໄດ້ຖືກທົດສອບໃນສະຖານະການໄພພິບັດແບບຈໍາລອງ (ຮູບພາບຂ້າງເທິງ), ດ້ວຍການເຈລະຈາອຸປະສັກທີ່ມີປະສິດທິພາບ, ຍົກເວັ້ນໃນການຕັ້ງຄ່າທີ່ທ້າທາຍໂດຍສະເພາະທີ່ກ່ຽວຂ້ອງກັບການປີນຕາມແນວຕັ້ງ, ນັບຕັ້ງແຕ່ແມງກະເບື້ອມີນ້ໍາຫນັກເບົາເນື່ອງຈາກອຸປະກອນທີ່ຕິດຄັດມາ.

ສະຖາປັດຕະຍະກໍາການນໍາທາງໃນເບື້ອງຕົ້ນມີແນວໂນ້ມທີ່ຈະຕິດຢູ່ໃນອຸປະສັກທີ່ລົ້ນເຫຼືອ, ເຊັ່ນ: ສະຖານະການທີ່ແມ້ກະທັ້ງແມງສາບຈະດໍາເນີນການຕໍ່ໄປອີກແລ້ວ, ແລະຕໍ່ມານັກຄົ້ນຄວ້າໄດ້ພັດທະນາລະບົບນໍາທາງຄໍາຄຶດຄໍາເຫັນທີ່ຄາດຄະເນເພື່ອປັບປຸງການປະຕິບັດໃນການປະເຊີນຫນ້າກັບອຸປະສັກສູງ. ລະບົບດັ່ງກ່າວສາມາດບັນລຸອັດຕາຄວາມສໍາເລັດ 100% ໃນສະພາບແວດລ້ອມທີ່ບໍ່ມີອຸປະສັກຫຼືຕ່ໍາ, ແລະອັດຕາຄວາມສໍາເລັດສູງກວ່າກັບອຸປະສັກສູງ.
ບ່ອນທີ່ຄວາມລົ້ມເຫລວເກີດຂຶ້ນ, ນັກຄົ້ນຄວ້າໄດ້ສະຫຼຸບວ່ານີ້ສາມາດແກ້ໄຂໄດ້ໂດຍການເພີ່ມໄລຍະເວລາຂອງການທົດລອງ, ເຖິງແມ່ນວ່າຢ່າງມີເຫດຜົນນີ້ມີຜົນກະທົບໃນສະຖານະການ USAR ທີ່ໃຊ້ເວລາທີ່ສໍາຄັນ.
ມຸມເບິ່ງອິນຟາເລດ
ກ້ອງ infrared onboard ມີສະເພາະເລັກນ້ອຍ, ການດໍາເນີນງານທີ່ 32×32 pixels ກັບພາກສະຫນາມ 90 ອົງສາຂອງທັດສະນະ. ຮູບພາບ, ເມື່ອຖືກກະຕຸ້ນ, ຈະຖືກສົ່ງຜ່ານການກັ່ນຕອງປານກາງ.
ລະບົບດັ່ງກ່າວບັນລຸອັດຕາຜົນສໍາເລັດ 87% ໃນການຈໍາແນກວິຊາຂອງມະນຸດຈາກປະເພດອື່ນໆຂອງລາຍເຊັນຄວາມຮ້ອນ, ເພີ່ມຂຶ້ນເຖິງ 90% ເມື່ອຢູ່ໃນລັດສະຫມີໃກ້ຄຽງຂອງ 0.5m ແລະ 1.5m.
ເນື່ອງຈາກຂໍ້ຈໍາກັດດ້ານພະລັງງານແລະຂະຫນາດຊິບ, ການສຶກສາເບື້ອງຕົ້ນບໍ່ມີລະບົບການທ້ອງຖິ່ນເທິງເຮືອ, ແລະດັ່ງນັ້ນຈຶ່ງບໍ່ສາມາດຕິດຕາມຕໍາແຫນ່ງຂອງແມງກະເບື້ອໃນເວລາທີ່ແທ້ຈິງ. ນັກຄົ້ນຄວ້າແນະນໍາວ່າການຄິດໄລ່ຕາຍສາມາດຖືກປະຕິບັດເປັນການແກ້ໄຂການປະຫຍັດພະລັງງານ, ໂດຍມີສັນຍານສະຖານທີ່ທີ່ມີພະລັງງານຕ່ໍາສົ່ງກັບຄືນສູ່ສູນຄວບຄຸມ, ໃນການຈັດຕັ້ງປະຕິບັດໃນອະນາຄົດ.
ແມງໄມ້ເປັນຜູ້ໃຫ້ບໍລິການຄົ້ນຫາ ແລະກູ້ໄພ
ສິບປີທີ່ຜ່ານມາໄດ້ນໍາເອົາໂຄງການຄົ້ນຄ້ວາທີ່ກວ້າງຂວາງທີ່ຊອກຫາການນໍາໃຊ້ຄວາມຢືດຢຸ່ນແລະພະລັງງານການນໍາທາງຂອງແມງໄມ້ເພື່ອສ້າງລະບົບຫຸ່ນຍົນປະສົມຫຼືບໍລິສຸດສໍາລັບສະຖານະການຄົ້ນຫາແລະກູ້ໄພ. ນອກເໜືອໄປຈາກວຽກງານກ່ຽວກັບແມງປີ 2016 ທີ່ມີຂຶ້ນກ່ອນການລິເລີ່ມຫລ້າສຸດນີ້, ຍັງມີຄວາມພະຍາຍາມຈໍານວນຫນຶ່ງທີ່ຈະສ້າງຄວາມສາມາດຂອງແມງໄມ້ໃນຮູບແບບຫຸ່ນຍົນຢ່າງດຽວ.
ເຫຼົ່ານີ້ປະກອບມີ ໂຄງການຄົ້ນຄວ້າ 2019 ຈາກ UoC ເຊິ່ງສະເຫນີຫຸ່ນຍົນທີ່ງ່າຍດາຍ ergonomically ໂດຍອີງໃສ່ຫຼັກການຂອງແມງສາບ, ຫນຶ່ງໃນບັນດາໂຄງການທໍາອິດຂອງຕົນເພື່ອແກ້ໄຂ fragility ທີ່ສຸດຂອງແມງໄມ້ຫຸ່ນຍົນ.















