Angle d’Anderson
Enseigner aux robots à comprendre les outils avec des champs de rayonnement neuronaux (NeRF)
Des nouvelles recherches de l’Université du Michigan proposent une méthode pour que les robots comprennent les mécanismes des outils et d’autres objets articulés du monde réel, en créant des objets de champs de rayonnement neuronaux (NeRF) qui démontrent la façon dont ces objets bougent, permettant potentiellement au robot de les manipuler et de les utiliser sans configuration préalable fastidieuse.

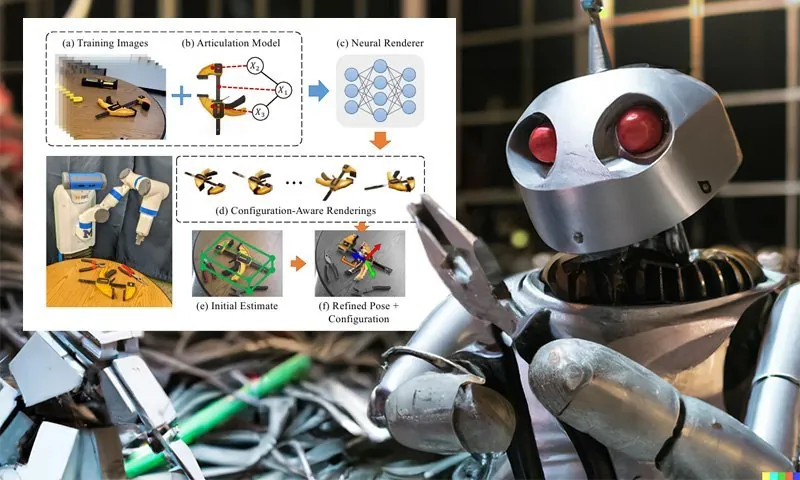
En utilisant des références de source connues pour la motilité interne des outils (ou tout objet avec une référence appropriée), NARF22 peut synthétiser une approximation photoréaliste de l’outil et de sa gamme de mouvement et de type d’opération. Source: https://progress.eecs.umich.edu/projects/narf/
Les robots qui doivent faire plus que simplement éviter les piétons ou exécuter des routines préprogrammées de manière élaborée (pour lesquelles des jeux de données non réutilisables ont probablement été étiquetés et formés à grands frais) ont besoin de cette capacité d’adaptation si’ils veulent travailler avec les mêmes matériaux et objets que le reste d’entre nous.
Jusqu’à présent, il y a eu un certain nombre d’obstacles pour doter les systèmes robotiques de ce type de polyvalence. Cela inclut la rareté de jeux de données applicables, dont beaucoup présentent un nombre très limité d’objets ; le coût élevé impliqué dans la génération de modèles 3D photoréalistes et basés sur des maillages qui peuvent aider les robots à apprendre l’instrumentalité dans le contexte du monde réel ; et la qualité non photoréaliste de ces jeux de données, ce qui fait que les objets apparaissent disjointes de ce que le robot perçoit dans le monde qui l’entoure, et l’entraîne à rechercher un objet ressemblant à une caricature qui n’apparaîtra jamais dans la réalité.
Pour répondre à cela, les chercheurs de Michigan, dont l’article intitulé NARF22: Neural Articulated Radiance Fields for Configuration-Aware Rendering, ont développé un pipeline en deux étapes pour générer des objets articulés basés sur NeRF qui ont une apparence de « monde réel » et qui intègrent le mouvement et les limitations qui en découlent pour tout objet articulé.

Bien que cela paraisse plus complexe, les deux étapes essentielles du pipeline NARF22 consistent à rendre les parties statiques des outils mobiles, puis à les composer dans un deuxième jeu de données qui est informé des paramètres de mouvement que ces parties ont les unes par rapport aux autres. Source: https://arxiv.org/pdf/2210.01166.pdf
Le système est appelé Neural Articulated Radiance Field – ou NARF22, pour le distinguer d’un autre projet portant un nom similaire.
NARF22
Déterminer si un objet inconnu est potentiellement articulé nécessite une quantité presque incroyable de connaissances a priori de type humain. Par exemple, si vous n’aviez jamais vu un tiroir fermé auparavant, il pourrait ressembler à n’importe quel autre type de panneau de décoration – ce n’est qu’une fois que vous l’avez réellement ouvert que vous internalisez « tiroir » comme un objet articulé avec un seul axe de mouvement (avant et arrière).
Par conséquent, NARF22 n’est pas destiné à être un système d’exploration pour ramasser des choses et voir si elles ont des parties mobiles actionnables – un comportement presque simien qui entraînerait un certain nombre de scénarios potentiellement catastrophiques. Plutôt, le cadre est basé sur les connaissances disponibles dans le format de description de robot universel (URDF) – un format XML open source largement applicable et approprié pour la tâche. Un fichier URDF contiendra les paramètres d’utilisation du mouvement dans un objet, ainsi que des descriptions et d’autres facettes étiquetées des parties de l’objet.
Dans les pipelines conventionnels, il est nécessaire de décrire essentiellement les capacités d’articulation d’un objet et d’étiqueter les valeurs de jointure pertinentes. Ce n’est pas une tâche bon marché ou facilement évolutives. Au lieu de cela, le flux de travail NaRF22 rend les composants individuels de l’objet avant de les « assembler » en une représentation NeRF articulée basée sur les connaissances des paramètres de mouvement fournis par URDF.

Dans la deuxième étape du processus, un nouveau rendu est créé qui intègre toutes les parties. Bien qu’il soit plus facile de simplement concaténer les parties individuelles à une étape antérieure et de sauter cette étape ultérieure, les chercheurs observent que le modèle final – qui a été formé sur un GPU NVIDIA RTX 3080 sous un CPU AMD 5600X – a des exigences de calcul inférieures pendant la rétropropagation que tel un assemblage abrupt et prématuré.
En outre, le modèle de deuxième étape s’exécute à une vitesse deux fois supérieure à un assemblage concaténé et « forcé », et les applications secondaires qui pourraient avoir besoin d’utiliser des informations sur les parties statiques du modèle n’auront pas besoin d’accéder elles-mêmes aux informations URDF, car celles-ci ont déjà été intégrées dans le rendu de deuxième étape.
Données et expériences
Les chercheurs ont mené un certain nombre d’expériences pour tester NARF22 : une pour évaluer le rendu qualitatif pour chaque configuration et pose de l’objet ; un test quantitatif pour comparer les résultats rendus à des points de vue similaires vus par des robots du monde réel ; et une démonstration de l’estimation de configuration et d’un défi de raffinement de 6 degrés de liberté (profondeur de champ) qui a utilisé NARF22 pour effectuer une optimisation basée sur le gradient.
Les données d’entraînement provenaient du jeu de données Progress Tools d’un article précédent de plusieurs des auteurs actuels. Progress Tools contient environ six mille images RGB-D (c’est-à-dire incluant des informations de profondeur, essentielles pour la vision robotique) à une résolution de 640×480. Les scènes utilisées comprenaient huit outils à main, divisés en leurs parties constitutives, avec des modèles de maillage et des informations sur les propriétés cinématiques des objets (c’est-à-dire la façon dont ils sont conçus pour bouger et les paramètres de ce mouvement).

Le jeu de données Progress Tools comporte quatre outils articulés. Les images ci-dessus sont des rendus basés sur NeRF à partir de NARF22.
Pour cette expérience, un modèle configurable final a été formé en utilisant uniquement des pince-monseigneur, des pince-nez long et un étau (voir image ci-dessus). Les données d’entraînement contenaient une seule configuration de l’étau et une pour chacune des pince-monseigneur.
La mise en œuvre de NARF22 est basée sur FastNeRF, avec les paramètres d’entrée modifiés pour se concentrer sur la pose concaténée et spatialement encodée des outils. FastNeRF utilise un perceptron multicouche factorisé (MLP) apparié avec un mécanisme d’échantillonnage voxelisé (les voxels sont essentiellement des pixels, mais avec des coordonnées 3D complètes, de sorte qu’ils puissent fonctionner dans un espace tridimensionnel).
Pour le test qualitatif, les chercheurs observent qu’il y a plusieurs parties occluses de l’étau (c’est-à-dire la colonne vertébrale centrale, qui ne peut pas être connue ou devinée en observant l’objet, mais seulement en interagissant avec lui, et que le système a du mal à créer cette géométrie « inconnue ».

Rendus qualitatifs des outils.
En revanche, les pince-monseigneur ont pu généraliser bien à de nouvelles configurations (c’est-à-dire à des extensions et des mouvements de leurs parties qui sont dans les paramètres URDF, mais qui ne sont pas explicitement abordés dans le matériel de formation du modèle.
Les chercheurs observent cependant que les erreurs d’étiquetage pour les pince-monseigneur ont entraîné une diminution de la qualité de rendu pour les extrémités très détaillées des outils, affectant négativement les rendus – un problème lié à des préoccupations plus larges autour de la logistique d’étiquetage, du budget et de la précision dans le secteur de la recherche en vision par ordinateur, plutôt qu’à une faille procédurale dans le pipeline NARF22.

Résultats du test d’exactitude de rendu.
Pour les tests d’estimation de configuration, les chercheurs ont effectué un raffinement de pose et une estimation de configuration à partir d’une pose « rigide » initiale, en évitant tout contournement ou accélérateur utilisé par FastNeRF lui-même.
Ils ont ensuite formé 17 scènes bien ordonnées du jeu de test de Progress Tools (qui avaient été mises de côté pendant l’entraînement), en exécutant 150 itérations d’optimisation par gradient sous l’optimiseur Adam. Cette procédure a récupéré l’estimation de configuration « extrêmement bien », selon les chercheurs.

Résultats du test d’estimation de configuration.
Publié pour la première fois le 5 octobre 2022.












