Robotique
Nouvel article soutient que les robots doivent comprendre les motivations humaines
Un nouvel article du National Centre for Nuclear Robotics, basé à l’Université de Birmingham, soutient que les robots doivent comprendre les motivations comme les humains. Si nous voulons que les humains et les robots travaillent efficacement et en toute sécurité ensemble, les robots ne peuvent pas simplement effectuer des tâches sans connaître la raison pour laquelle ils les font.
L’auteur principal de l’article est le Dr Valerio Ortenzi de l’Université de Birmingham. Il déclare que cela est nécessaire à mesure que l’économie devient de plus en plus automatisée, connectée et numérisée. C’est également important car il y aura une augmentation spectaculaire des interactions entre les humains et les robots à la fois dans les usines et les foyers.
L’article a été publié dans Nature Machine Intelligence. Il se concentre en partie sur les robots utilisant des objets et « Grasping », une action qui est facilement réalisée dans la nature mais qui est difficile pour les robots.
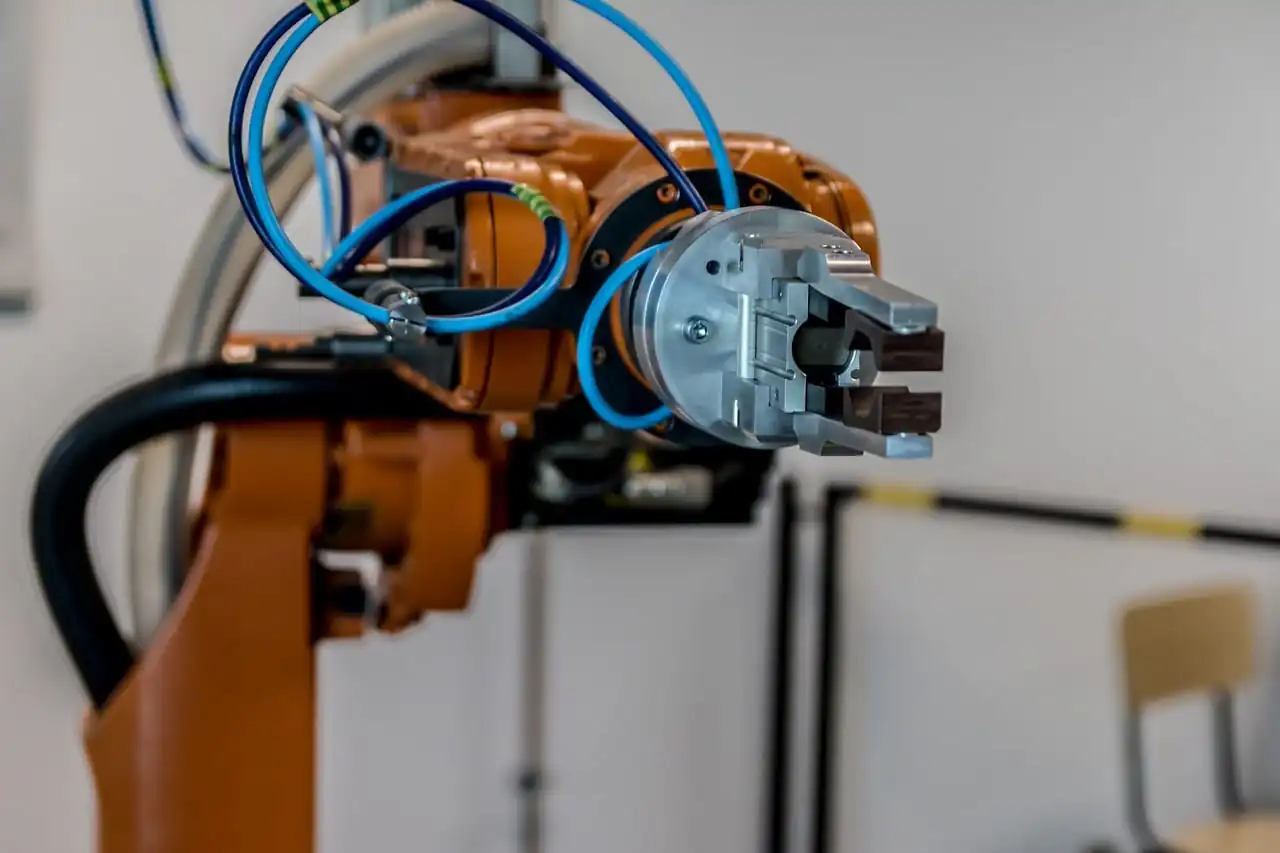
Nos robots actuels dans les usines prennent aveuglément des objets qu’ils connaissent déjà. Ces objets sont également à des endroits prédéterminés pendant des périodes sélectionnées. Si une machine devait prendre un objet qu’elle ne connaît pas, et à un endroit aléatoire, elle aurait besoin de plusieurs technologies complexes travaillant ensemble. Certaines de ces technologies sont des systèmes de vision et un intelligence artificielle avancée. Certaines nécessitent même des capteurs situés dans la pince pour empêcher le robot de broyer l’objet.
Les chercheurs du National Centre for Nuclear Robotics déclarent que même avec toutes ces technologies, la machine ne connaît pas les raisons pour lesquelles elle prend un objet. À cause de cela, ce que nous considérions comme des actions réussies effectuées par les robots peuvent en réalité être des échecs dans le monde réel.
L’article dans Nature Machine Intelligence utilise l’exemple d’un robot qui livre un objet à un client après l’avoir pris. Le robot prend l’objet avec succès sans le broyer. Le problème surgit lorsque le robot couvre un code à barres important. Cela signifie que l’objet ne peut pas être suivi et qu’il n’y a pas d’information confirmant la livraison réussie de l’objet. Cela complique les choses et entraîne une défaillance du système de livraison car le robot ne connaît pas certaines conséquences de la prise de l’objet de manière incorrecte.
Le Dr Ortenzi et les co-auteurs de l’article ont parlé d’autres exemples.
« Imaginez demander à un robot de vous passer un tournevis dans un atelier. Sur la base des conventions actuelles, la meilleure façon pour un robot de prendre l’outil est par le manche. Malheureusement, cela pourrait signifier qu’une machine extrêmement puissante pousse ensuite une lame potentiellement mortelle vers vous, à grande vitesse. Au lieu de cela, le robot doit savoir quel est l’objectif final, c’est-à-dire passer le tournevis en toute sécurité à son collègue humain, afin de réévaluer ses actions. »
« Un autre scénario imagine un robot qui passe un verre d’eau à un résident dans une maison de soins. Il doit s’assurer de ne pas laisser tomber le verre mais également que l’eau ne se renverse pas sur le destinataire pendant l’acte de passer, ou que le verre est présenté de telle sorte que la personne puisse le prendre. »
« Ce qui est évident pour les humains doit être programmé dans une machine et cela nécessite une approche profondément différente. Les métriques traditionnelles utilisées par les chercheurs, au cours des vingt dernières années, pour évaluer la manipulation robotique, ne sont pas suffisantes. Dans le sens le plus pratique, les robots ont besoin d’une nouvelle philosophie pour prendre pied. »
Le professeur Rustman Stolkin, directeur du National Centre for Nuclear Robotics, a parlé du rôle de l’organisation dans le développement de cette technologie.
« Le National Centre for Nuclear Robotics est unique en travaillant sur des problèmes pratiques avec l’industrie, tout en générant simultanément la recherche universitaire de pointe de la plus haute qualité – comme en témoigne cet article de référence. »
La nouvelle recherche a été menée avec le Centre of Excellence for Robotic Vision à l’Université de technologie du Queensland, en Australie, Scuola Superiore Sant’Anna, en Italie, le Centre aérospatial allemand (DLR), en Allemagne, et l’Université de Pise, en Italie.












