
Robotique
Technologie d'infographie adaptée à la robotique douce
Des scientifiques de l'Université de Californie à Los Angeles (UCLA) et de l'Université Carnegie Mellon ont adapté une technologie d'infographie sophistiquée pour la robotique douce. Ils ont utilisé la même technologie sur laquelle les animateurs de films et les développeurs de jeux vidéo s'appuient pour créer des images très détaillées, telles que les cheveux et les tissus dans les films d'animation. Il est maintenant utilisé par les scientifiques pour simuler des robots mous et membres et leurs mouvements.
L'ouvrage a été publié dans Communications Nature le 6 mai. Le document est intitulé "Simulation dynamique de robots souples articulés. »
Khalid Jawed est l'auteur de l'étude et professeur adjoint de génie mécanique et aérospatial à la UCLA Samueli School of Engineering.
"Nous avons réalisé une simulation plus rapide qu'en temps réel des robots mous, et c'est une étape majeure vers de tels robots qui sont autonomes et peuvent planifier leurs actions par eux-mêmes", a déclaré Jawed. "Les robots mous sont faits de matériaux flexibles qui les rendent intrinsèquement résistants aux dommages et potentiellement beaucoup plus sûrs en interaction avec les humains. Avant cette étude, il était difficile de prédire le mouvement de ces robots, car ils changent de forme pendant le fonctionnement. »
Technologies DER et FEM
Un algorithme appelé tiges élastiques discrètes (DER) est souvent utilisé dans la réalisation de films afin d'animer des objets fluides. En une fraction de seconde seulement, DER est capable de prédire des centaines de mouvements.
Les chercheurs ont entrepris d'utiliser DER pour développer un moteur physique capable de simuler les mouvements de robots bio-inspirés. Ils souhaitaient également l'utiliser pour des robots qui évoluent dans des environnements difficiles, comme ceux développés pour Mars ou sous l'eau.
La méthode des éléments finis (FEM) est également une technologie basée sur des algorithmes, et elle est capable de simuler les mouvements de robots solides et rigides. Cependant, FEM n'est pas idéal lorsqu'il s'agit de mouvements doux et naturels et du niveau de détail requis. En plus de cela, FEM repose sur une grande puissance de calcul et nécessite de longues périodes de temps.
Afin de développer et de simuler des robots mous, les roboticiens se sont appuyés sur des méthodes d'essais et d'erreurs.
Carmel Majidi est professeur agrégé de génie mécanique au Carnegie Mellon's College of Engineering.
« Les robots fabriqués à partir de matériaux durs et rigides sont relativement faciles à modéliser avec les outils de simulation informatique existants », a déclaré Majidi. « Jusqu'à présent, il n'existait pas de logiciels performants pour simuler des robots mous et spongieux. Notre travail est l'un des premiers à démontrer comment simuler avec succès des robots mous grâce au même logiciel d'infographie que celui utilisé pour modéliser les cheveux et les tissus dans les films à succès et les films d'animation. »
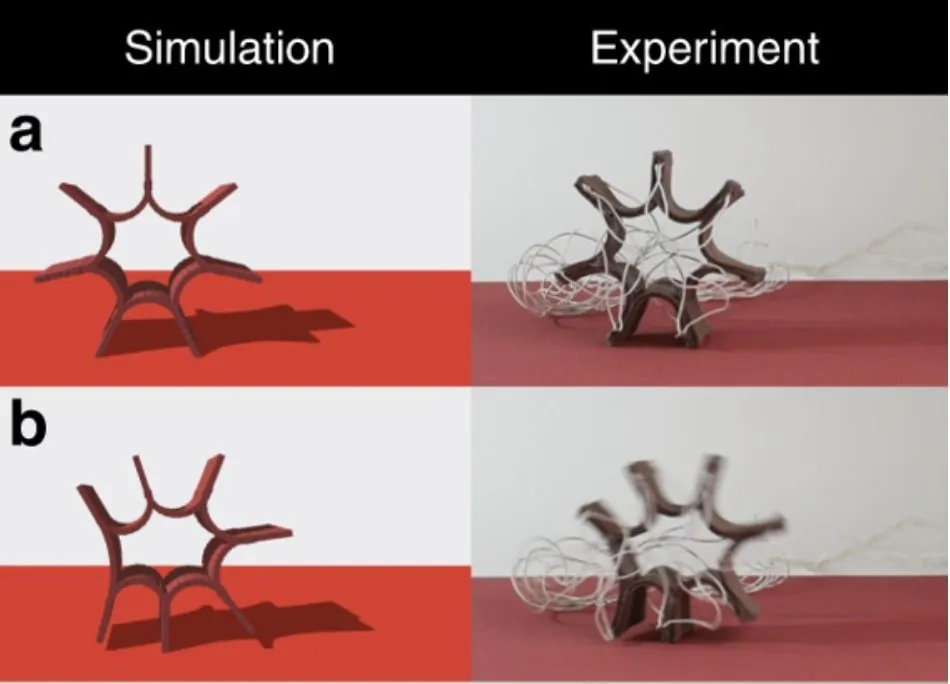
Les chercheurs ont commencé à collaborer au sein du Soft Machines Lab de Majidi il y a plus de trois ans. Leur projet le plus récent impliquait Jawed exécutant des simulations dans son laboratoire de recherche à l'UCLA et Majidi effectuant des expériences physiques pour confirmer les résultats de la simulation.
L'outil de simulation réduit considérablement le temps nécessaire pour amener un robot souple au point d'application.
Soutien du Bureau de recherche de l'armée
La recherche a été en partie financée par le Bureau de recherche de l'armée, qui fait partie du Laboratoire de recherche de l'armée du Commandement du développement des capacités de combat de l'armée américaine.
Le Dr Samuel Stanton est gestionnaire de programme au Bureau de recherche de l'armée.
"Les progrès expérimentaux de la robotique douce dépassent la théorie depuis plusieurs années", a déclaré Stanton. "Cet effort est une étape importante dans notre capacité à prévoir et à concevoir la dynamique et le contrôle de robots hautement déformables opérant dans des espaces confinés avec des contacts complexes et des environnements en constante évolution."
La technologie est maintenant explorée et testée sur d'autres types de robots mous. L'un de ces domaines est celui des robots basés sur les mouvements des bactéries et des étoiles de mer, qui pourraient être utilisés dans des tâches océanographiques telles que la surveillance des conditions de l'eau de mer ou l'inspection de la vie marine.











