Robotics & Physical AI
Robots Walk Faster With Newly Developed Flexible Feet
Roboticists at the University of California San Diego have developed flexible feet for robots. The new technology can result in robots walking 40 percent faster on uneven terrains like pebbles and wood chips.
The new development is important for a variety of different applications, especially search-and-rescue missions.
The research will be presented at the RoboSoft conference, which will be virtual and take place between May 15 and July 15, 2020.
Emily Lathrop is a Ph.D. student at the Jacobs School of Engineering at UC San Diego and the first author of the paper.
“Robots need to be able to walk fast and efficiently on natural, uneven terrain so they can go everywhere humans can go, but maybe shouldn’t,” Lathrop said.
Michael T. Tolley is a professor in the Department of Mechanical and Aerospace Engineering at UC San Diego. He is the senior author of the paper.
“Usually, robots are only able to control motion at specific joints,” said Tolley. “In this work, we showed that a robot that can control the stiffness, and hence the shape, of its feet outperforms traditional designs and is able to adapt to a wide variety of terrains.”
Flexible Robotic Feet
The flexible robotic feet consist of a latex membrane that is filled with coffee grounds. The coffee grounds are able to go back and forth between acting as a solid and a liquid. The mechanism that allows granular media, such as the coffee grounds, to act this way is called granular jamming. As a result, the robots can walk faster and have a better grip.
As the robot feet touch the ground, they turn firm and conform to the surface in order to establish solid footing. When they move, the feet unjam and loosen up between steps, and support structures are relied on to help them stay flexible while jammed.
These flexible feet were the first of their kind to be tested on uneven surfaces.

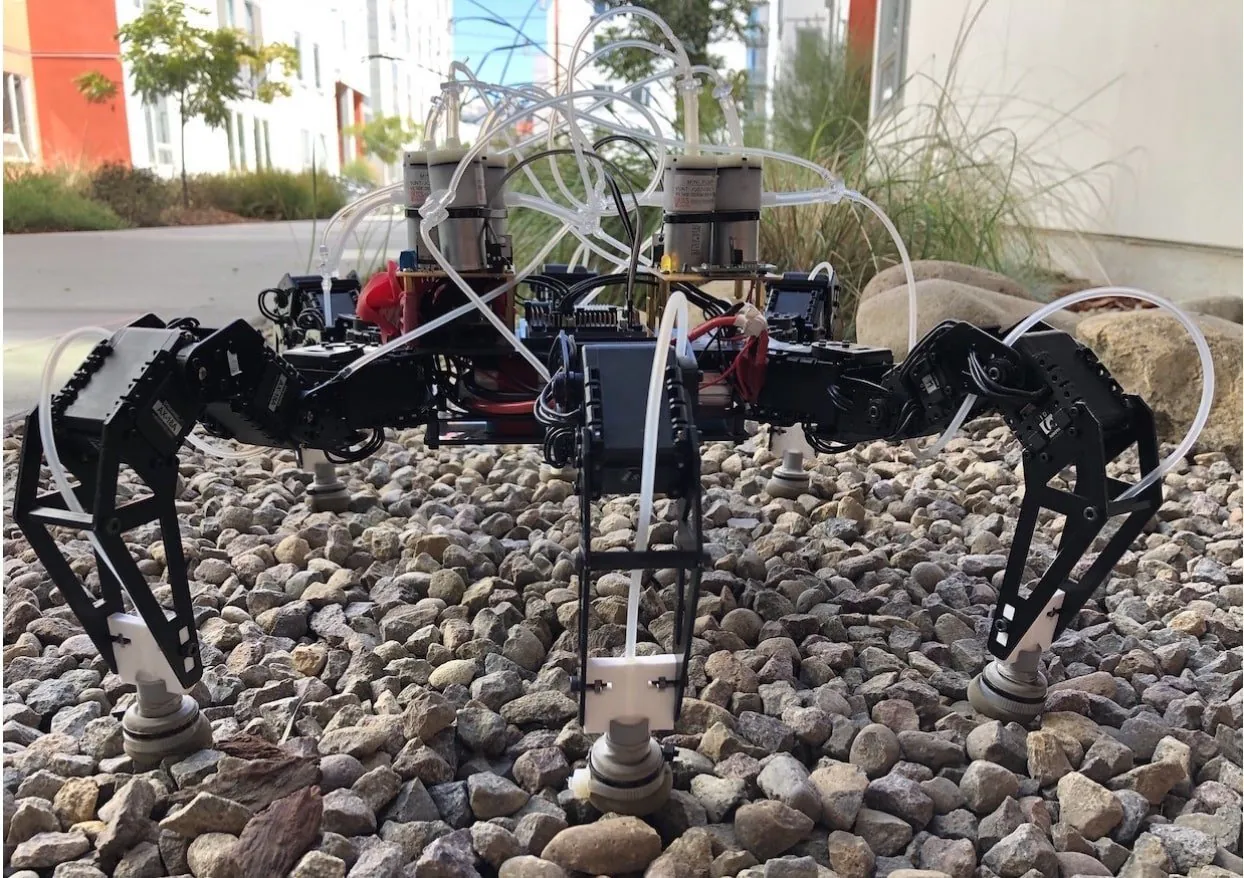
The researchers installed the feet on a hexapod robot, and they designed and built an on-board system. The on-board system is capable of generating negative pressure and positive pressure in order to unjam and jam the feet between each step. In order to jam the feet, a vacuum pump removes air between the coffee grounds. They can also be passively jammed if the weight of the robot forces the air out from between the coffee grounds.
Uneven Surfaces
The robot was tested walking on a variety of different surfaces, including flat ground, wood chips, and pebbles, with and without the flexible feet. The findings were that passive jamming is most effective on flat ground and active jamming is best on loose rocks.
With the flexible feet, the robot’s legs were able to grip the ground better, which in turn increased its speed. This was especially true when the robot walked up sloped and uneven terrain.
Nick Gravish is a professor in the UC San Diego Department of Mechanical and Aerospace Engineering and study co-author.
“The natural world is filled with challenging grounds for walking robots — slippery, rocky, and squishy substrates all make walking complicated,” said Gravish. “Feet that can adapt to these different types of ground can help robots improve mobility.”
The researchers will now attempt to incorporate soft sensors on the bottom of the feet, which will allow an electronic control board to be utilized. The electronic control board would identify the type of ground that the robot is going to walk over and if the feet need to be actively or passively jammed. The researchers will also continue to improve design and control algorithms for better efficiency.












