
რობოტები
მობილური დატენვის სისტემა ელექტროენერგიით შიმშილი ავტონომიური რობოტებისთვის
რუსმა მკვლევარებმა შეიმუშავეს რობოტის პროტოტიპი, რომელსაც შეუძლია განახორციელოს სასოფლო-სამეურნეო და სამრეწველო რობოტების დროებითი დამუხტვის მისიები, რომელთა ავტონომია სხვაგვარად შეზღუდულია დენის წყაროს არარსებობით, და რომელიც ასევე შეიცავს შემოთავაზებულ სტანდარტს დამტენი შტეფსელი/სოკეტის კონფიგურაციისთვის, რომელიც გამოიყენება მობილური რობოტების სისტემებისთვის.
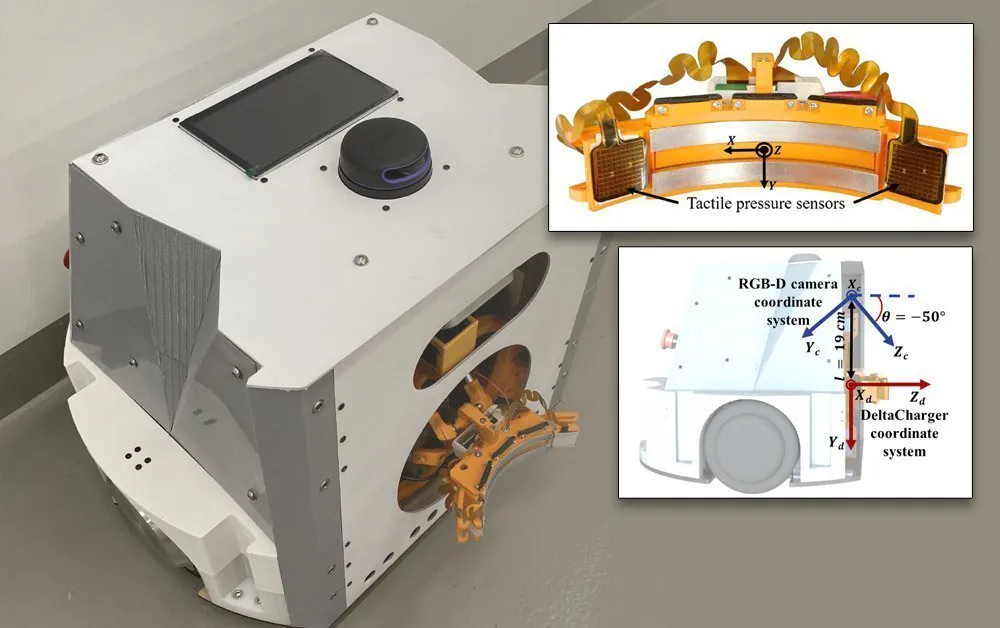
"MobileCharger"-ის პროტოტიპი, გამოვლინდა მოსკოვის სკოლკოვოს მეცნიერებისა და ტექნოლოგიების ინსტიტუტის ბოლო ნაშრომში, იგი აღჭურვილია ჩართულობის მექანიზმით, რომელიც არ განსხვავდება სამხედრო საჰაერო ტრანსპორტის სისტემების ფართო გადაკეტვის შესაძლებლობებისგან, რომლებიც შექმნილია ფრენის დროს საწვავის შესავსებად.
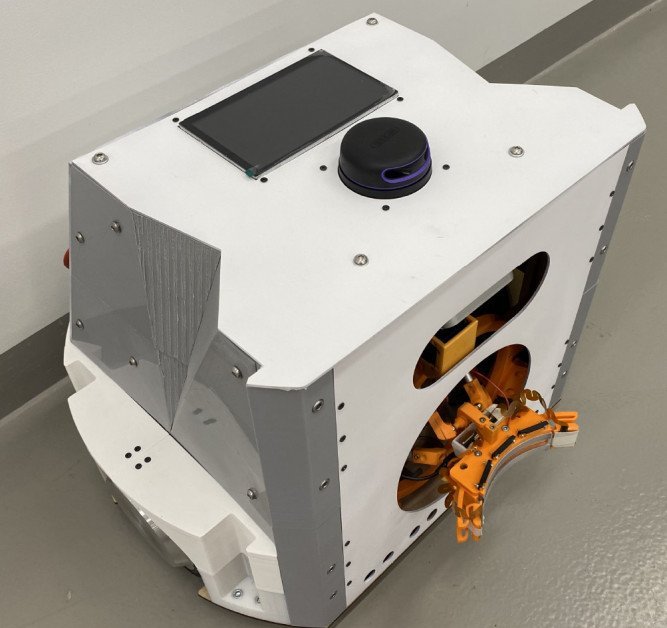
MobileCharger-ის პროტოტიპი რობოტი. წყარო: https://arxiv.org/pdf/2107.10585.pdf
MobileCharger ცდილობს გააუმჯობესოს ბოლო წლების მსგავსი ინიციატივები, როგორიცაა Volkswagen-ის 'Laderoboter' მობილური დამტენი რობოტი და Samsung-ის EVAR დამტენი რობოტი რამდენიმე გზით: წონასა და სიმძლავრეს შორის უკეთესი ურთიერთგაცვლის გზით; დატენვის ოპერაციებისთვის სივრცის მოთხოვნების შემცირებით (EVAR-ის სისუსტე); კონვოლუციური ნერვული ქსელების (CNN) გამოყენებით ჩართულობის ოპერაციის ოპტიმიზაციისთვის; და სენსორების სპექტრის გამოყენებით, მათ შორის LiDAR და ტაქტილური სენსორები, რათა შეფასდეს დასატენი რობოტის შედარებითი პოზიცია.

დაწყვილების სისტემას აქვს გადაადგილების შედარებით თავისუფლება სამი მიმართულებით, რათა მოერგოს საველე რობოტების სხვადასხვა დიზაინს და გაითვალისწინოს ისეთი გარემო, რომელიც შეიძლება იყოს უფრო არათანაბარი რელიეფი, ვიდრე ქარხნის იატაკის ბრტყელი ზედაპირი.
დატენვის ოპერაციები გაგრძელდება დაახლოებით ოთხი საათის განმავლობაში, თანმიმდევრული გადაცემით 22 ვოლტი. პროცესის დროს აუცილებელია, რომ ფიზიკური კავშირი დარჩეს თანმიმდევრული, რადგან ჰორიზონტალური ან ვერტიკალური არასწორი განლაგება, დიდი ალბათობით, გამოიწვევს რომელიმე ან ორივე რობოტის დაზიანებას, დაუსაბუთებელი ელექტრული გამონადენის შესაძლებლობით.
ინვერსიული დელტა აქტუატორი, რომელიც წარმოდგენილია MobileCharger-ში, გვთავაზობს უკეთეს ოპერაციულ სიჩქარეს, ვიდრე ბოლოდროინდელი გადაწყვეტილებები საველე დატენვის სცენარებთან დაკავშირებით, მკვლევარები ამტკიცებენ, რომ მისი კომპაქტური და განსხვავებული დიზაინის წარმოება უფრო ადვილი იქნება.

Delta Actuator-ს ასევე აქვს მაგნიტზე დაფუძნებული ჩაკეტვა, თუმცა ეს არ იქნება საკმარისი იმისათვის, რომ შეინარჩუნოს უსაფრთხო კონტაქტი დამუხტვის ოპერაციების დროს და გამყარებულია რამდენიმე დამატებითი მიდგომით, მათ შორის დასაყენებელი რგოლი და ბოლო ეფექტორი ელექტროდებითა და სერვომოტორებით.
დიზაინი-აგნოსტიკური დამუხტვა
MobileCharger არ არის შექმნილი იმისთვის, რომ ჰქონდეს სრული ცოდნა დომენის შესახებ ყველა რობოტის შესახებ, რომლის გადატვირთვაც შეიძლება საჭირო გახდეს, მაგრამ სამაგიეროდ გამოიყენებს სხვადასხვა მეთოდებს რობოტის შასისზე თავსებადი დასამუხტი სოკეტის იდენტიფიცირებისთვის და მანევრირების სიახლოვეში. ის სამიზნე რობოტთან დასაკავშირებლად.
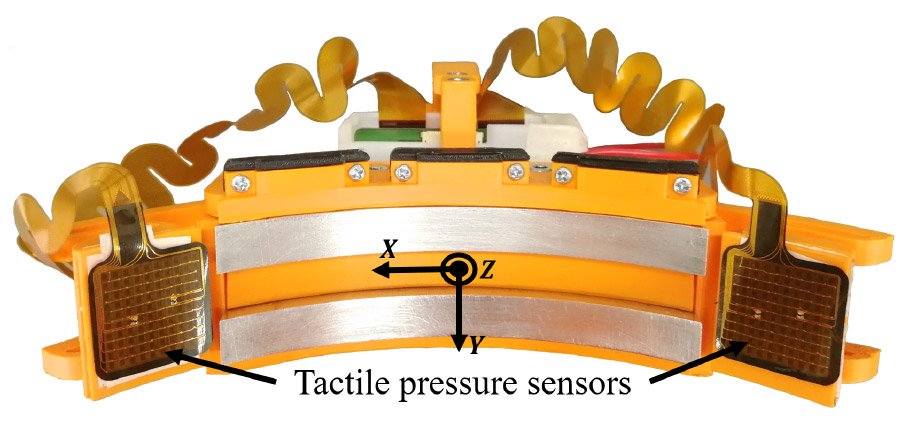
ტაქტილური წნევის სენსორების მასივი MobileCharger-ის დამაგრების მექანიზმში.
ეფექტურად MobileCharger აწვდის გადაწყვეტილებების სპექტრს გასწორების შეფასებისა და თანმიმდევრული ჩართულობის გამოწვევაზე, მათ შორის RGB-D (სიღრმეზე ჩართული) კომპიუტერულ ხედვის სისტემები ხილის კრეფის რობოტებისა და წნევისადმი მგრძნობიარე ტაქტილური და ჰაპტიკური უკუკავშირის სისტემები დახურული ინდუსტრიული რობოტების.
სურათის ამოცნობა
MobileCharger-ის LiDAR სკანერი გამყარებულია Intel RealSense D435 RGB-ით სიღრმის კამერა სიახლოვის შეფასებისთვის, რომელიც ასევე ემსახურება როგორც კვების მექანიზმს რობოტის CNN-ზე დაფუძნებული კონტაქტის შეფასების შესაძლებლობებისთვის.
MobileCharger-ის მიერ გამოყენებული ობიექტების ამოცნობის სისტემა დაფუძნებულია YOLOv3-ზე, რეალურ დროში გამოსახულების ამოცნობის ეფექტურ სისტემაზე 106 ფენით, რომელიც აღჭურვილია პერსონალურად გაწვრთნილი მონაცემთა ნაკრებით, რომელიც ორიენტირებულია დამტენის შემოთავაზებულ დიზაინზე.
მონაცემთა ნაკრები შეიცავს 170 ნიმუშს, დაყოფილია 120-ს შორის ვარჯიშისთვის და 50-ს შორის სატესტო კომპლექტებში, დამზადებულია სხვადასხვა განათების პირობებში და 75-დან 105 გრადუსამდე ვარიაციების დიაპაზონში. სასწავლო მონაცემთა ნაკრების სურათები არის 840×480 გარჩევადობით და შეიცავს RGB და სიღრმის მონაცემებს.
კონვოლუციური ნერვული ქსელი
MobileCharger-ში გამოყენებული CNN ეხმიანება დამუხტვის ოპერაციის დროს თანმიმდევრული კონტაქტის საკითხს და იკვებება ორი შეკვეთილი მონაცემთა ნაკრებით: პირველი მონაცემთა ნაკრები შეიცავს მონაცემებს ელექტროდებს შორის კუთხური არასწორი განლაგების შესახებ, 600 მონაცემთა წყვილით, რომლებიც წარმოიქმნება ტაქტილური სენსორის მექანიზმებიდან; მეორე მონაცემთა ნაკრები ეხება ბოლო ეფექტორის ჰორიზონტალურ და ვერტიკალურ არასწორ განლაგებას (დამუხტვის შეკრება) და შეიცავს 500 მონაცემთა წყვილს.
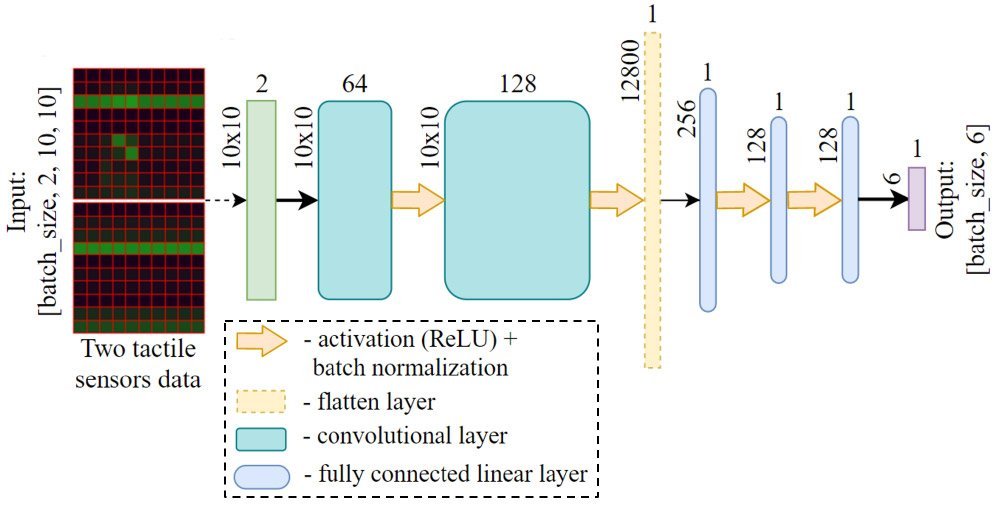
CNN არქიტექტურა დაჯექი თანმიმდევრულობისთვის.
მონაცემები დაყოფილი იყო 67% ტრენინგის და 33% შეფასების ნაკრებებად, სიზუსტით, როგორც სამიზნე მეტრიკა.
სანამ CNN/YOLO მეთოდს გადაწყვეტდნენ, მკვლევარებმა განიხილეს ორიენტირებული გრადიენტების ჰისტოგრამის (HoG) გამოყენება დამხმარე ვექტორული მანქანით (SVM) და ასევე კონტურის გამოვლენა Canny edge დეტექტორით. არც ერთი მეთოდი არ იქნა მიჩნეული საკმარისად მდგრადი საველე დატენვის ოპერაციების გამოწვევების მიმართ.
SwarmCharge
MobileCharger სისტემა განკუთვნილია შიდა და გარე გარემოსთვის და მკვლევარების მომავალი მუშაობა ეხება ლოკალიზაციისა და რუკების ალგორითმების განვითარებას. 1-დოფ ასევე შეისწავლება, როგორც დამატებითი საშუალება ელექტროდის ბრუნვისთვის შეერთების მექანიზმის რულონურ ღერძში.
როგორც მოსალოდნელია, საკუთრების შეერთების სისტემა საბოლოოდ განკუთვნილია რობოტებისა და ავტონომიური მოწყობილობების უფრო ფართო ეკოსტრუქტურისთვის, რომელსაც ნაშრომი ამბობს, რომ დაერქმევა SwarmCharge. MobileCharger განკუთვნილია იყოს დამხმარე სისტემა რობოტების მრავალფეროვნებისთვის, მათ შორის ჰუმანოიდური, ოთხფეხა და უპილოტო საფრენი აპარატების მექანიზმებისთვის.















