Robotique
Les robots marchent plus vite avec des pieds flexibles nouvellement développés
Les roboticistes de l’Université de Californie à San Diego ont développé des pieds flexibles pour les robots. La nouvelle technologie peut permettre aux robots de marcher 40 pour cent plus vite sur des terrains inégaux comme des cailloux et des copeaux de bois.
Le nouveau développement est important pour une variété d’applications différentes, en particulier les missions de recherche et de sauvetage.
La recherche sera présentée à la conférence RoboSoft, qui sera virtuelle et aura lieu entre le 15 mai et le 15 juillet 2020.
Emily Lathrop est une étudiante en doctorat à la Jacobs School of Engineering de l’UC San Diego et la première auteure de l’article.
« Les robots doivent être capables de marcher rapidement et efficacement sur des terrains naturels inégaux afin qu’ils puissent aller partout où les humains peuvent aller, mais peut-être ne devraient pas », a déclaré Lathrop.
Michael T. Tolley est professeur au département de génie mécanique et aérospatiale de l’UC San Diego. Il est l’auteur principal de l’article.
“Habituellement, les robots ne sont capables de contrôler le mouvement qu’à des articulations spécifiques”, a déclaré Tolley. “Dans ce travail, nous avons montré qu’un robot capable de contrôler la rigidité, et donc la forme, de ses pieds surpasse les conceptions traditionnelles et est capable de s’adapter à une grande variété de terrains.”
https://www.youtube.com/watch?v=rVKKwbaojAo&feature=emb_logo
Pieds robotiques flexibles
Les pieds robotiques flexibles sont constitués d’une membrane en latex remplie de grains de café. Les grains de café peuvent passer d’un état solide à un état liquide. Le mécanisme qui permet aux médias granulaires, tels que les grains de café, de se comporter de cette manière s’appelle le blocage granulaire. En conséquence, les robots peuvent marcher plus vite et avoir une meilleure prise.
Lorsque les pieds du robot touchent le sol, ils deviennent fermes et se conforment à la surface pour établir une base solide. Lorsqu’ils bougent, les pieds se débloquent et se détendent entre les pas, et des structures de support sont utilisées pour les aider à rester flexibles tout en étant bloqués.
Ces pieds flexibles ont été les premiers de leur kind à être testés sur des surfaces inégales.

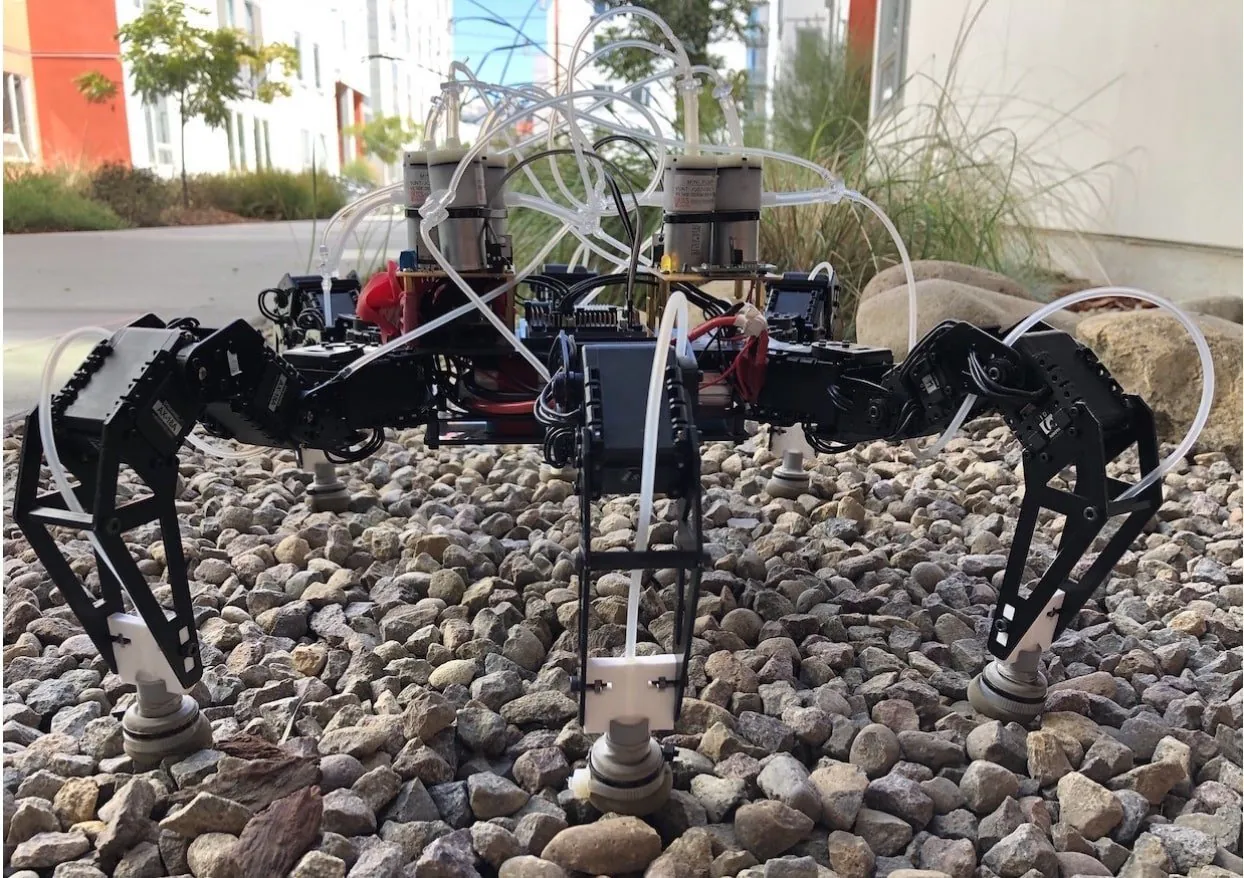
Les chercheurs ont installé les pieds sur un robot hexapode et ont conçu et construit un système embarqué. Le système embarqué est capable de générer une pression négative et une pression positive pour débloquer et bloquer les pieds entre chaque pas. Pour bloquer les pieds, une pompe à vide retire l’air entre les grains de café. Ils peuvent également être bloqués passivement si le poids du robot force l’air à sortir des grains de café.
Surfaces inégales
Le robot a été testé en marchant sur une variété de surfaces différentes, notamment des sols plats, des copeaux de bois et des cailloux, avec et sans les pieds flexibles. Les résultats ont montré que le blocage passif est le plus efficace sur des sols plats et que le blocage actif est le meilleur sur des roches lâches.
Avec les pieds flexibles, les jambes du robot ont pu mieux saisir le sol, ce qui a augmenté sa vitesse. C’était particulièrement vrai lorsque le robot marchait sur des pentes et des terrains inégaux.
Nick Gravish est professeur au département de génie mécanique et aérospatiale de l’UC San Diego et co-auteur de l’étude.
“Le monde naturel est rempli de terrains difficiles pour les robots qui marchent – des substrats glissants, rocheux et moussus rendent la marche compliquée”, a déclaré Gravish. “Des pieds qui peuvent s’adapter à ces différents types de sol peuvent aider les robots à améliorer leur mobilité.”
Les chercheurs vont maintenant essayer d’intégrer des capteurs souples au bas des pieds, qui permettront d’utiliser une carte de contrôle électronique. La carte de contrôle électronique identifiera le type de sol que le robot va traverser et si les pieds doivent être bloqués activement ou passivement. Les chercheurs vont également continuer à améliorer les algorithmes de conception et de contrôle pour une meilleure efficacité.












