Robotique
Méthode d’apprentissage permet aux robots d’apprendre en regardant les humains
Une nouvelle méthode d’apprentissage développée par des chercheurs à l’Université Carnegie Mellon (CMU) permet aux robots d’apprendre directement à partir de vidéos d’interaction humaine et de généraliser les informations à de nouvelles tâches, ce qui les aide à apprendre à effectuer des tâches ménagères. La méthode d’apprentissage s’appelle WHIRL, qui signifie Apprentissage robotique imitant les humains dans la nature, et elle aide le robot à observer les tâches et à collecter les données vidéo pour finalement apprendre à accomplir le travail lui-même.
La recherche a été présentée à la conférence Robotics : Science and Systems à New York.
L’imitation comme moyen d’apprentissage
Shikhar Bahl est un étudiant en doctorat à l’Institut de robotique (RI) de l’École des sciences de l’informatique de l’Université Carnegie Mellon.
« L’imitation est un excellent moyen d’apprendre », a déclaré Bahl. « Le fait que les robots apprennent réellement en regardant directement les humains reste un problème non résolu dans le domaine, mais ce travail constitue un pas important pour permettre cette capacité. »
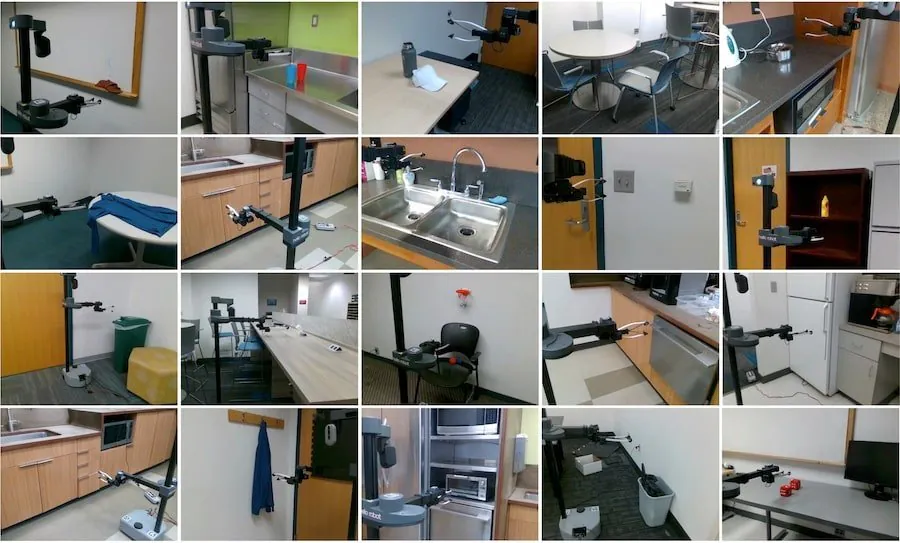
Bahl a travaillé aux côtés de Deepak Pathak et Abhinav Gupta, qui sont également des membres du corps professoral de l’RI. L’équipe a ajouté une caméra et leur logiciel à un robot standard qui a appris à accomplir plus de 20 tâches. Ces tâches comprenaient tout, de l’ouverture et de la fermeture d’appareils électroménagers à la sortie d’un sac poubelle de la poubelle. Chaque fois, le robot regardait un humain accomplir les tâches avant de les tenter lui-même.
Pathak est professeur adjoint à l’RI.
« Ce travail présente un moyen d’introduire les robots dans les foyers », a déclaré Pathak. « Au lieu d’attendre que les robots soient programmés ou formés pour accomplir avec succès différentes tâches avant de les déployer dans les maisons des gens, cette technologie nous permet de déployer les robots et de leur apprendre à accomplir des tâches, tout en s’adaptant à leur environnement et en s’améliorant uniquement en regardant. »
https://www.youtube.com/watch?v=pIbHOuvuCl8
WHIRL vs. les méthodes actuelles
La plupart des méthodes actuelles pour enseigner une tâche à un robot reposent sur l’imitation ou l’apprentissage par renforcement. Avec l’apprentissage par imitation, les humains manipulent manuellement un robot et lui enseignent comment accomplir une tâche, ce qui nécessite d’être effectué plusieurs fois avant que le robot n’apprenne. Avec l’apprentissage par renforcement, le robot est généralement formé sur des millions d’exemples en simulation avant d’adapter la formation au monde réel.
Bien que ces deux modèles soient efficaces pour enseigner une tâche à un robot dans un environnement structuré, ils s’avèrent difficiles à mettre à l’échelle et à déployer. Mais avec WHIRL, un robot peut apprendre à partir de n’importe quelle vidéo d’un humain accomplissant une tâche. Il est également facilement évolutif, non limité à une tâche spécifique et peut fonctionner dans des environnements domestiques.
WHIRL permet aux robots d’accomplir des tâches dans leurs environnements naturels. Et même si les premières tentatives se sont généralement soldées par un échec, il pouvait apprendre très rapidement après seulement quelques succès. Le robot n’accomplit pas toujours la tâche avec les mêmes mouvements qu’un humain, mais c’est parce qu’il a des pièces qui bougent différemment. Avec cela dit, le résultat final de l’accomplissement des tâches est toujours le même.
« Pour mettre à l’échelle la robotique dans la nature, les données doivent être fiables et stables, et les robots doivent s’améliorer dans leur environnement en pratiquant seuls », a déclaré Pathak.
