
Vigilància
Identificació de l'abús del telèfon mòbil dels conductors amb filtres polaritzadors i reconeixement d'objectes

Investigadors del Regne Unit han proposat un sistema de carretera per automatitzar la detecció de l'ús il·legal de telèfons mòbils entre els conductors, utilitzant filtres fotoòptics clàssics i captura d'infrarojos. Depenent de la qualitat de l'equip de captura, el sistema ha demostrat una taxa de precisió de fins al 95.81% en proves del món real.
Un dels models dels investigadors en acció. La zona del parabrisa s'identifica i s'aïlla primer com a àrea de captació per a una cerca assistida per IA d'imatges d'un telèfon mòbil. El sistema està dissenyat per ignorar els telèfons mòbils muntats i cercar dispositius que el conductor manté activament. Font: https://www.youtube.com/watch?v=PErIUr3Cxvg
El investigació es titula Identificació de les infraccions de l'ús del telèfon del conductor mitjançant la detecció d'objectes d'última generació amb seguiment, i prové de l'Escola d'Informàtica de la Universitat de Newcastle.
Superació de la reflectivitat dels parabrises
Els enfocaments anteriors a la detecció de l'ús de dispositius mòbils entre els conductors s'han vist obstaculitzats per l'alta reflectivitat dels parabrises durant les hores de llum del dia, agreujat quan els reflexos de grups de grans núvols enfosquien encara més l'interior del vehicle. Aquests casos no es poden abordar de manera realista amb fonts de llum infraroja, ja que la quantitat d'il·luminació IR necessària per penetrar la llum natural requeriria molts recursos.
Per tant, els investigadors de Newcastle proposen el truc més antic del llibre (que es remunta a 1812) per eliminar els reflexos d'una superfície de vidre percebuda: un mètode físic barat i econòmic. filtre polaritzador que es podrien connectar a les càmeres de vigilància a la carretera, calibrades una vegada, i després permetre una mirada clara a l'interior del vehicle.

A dalt, una vista sense filtre del parabrisa d'un cotxe. A sota, la mateixa vista amb un filtre polaritzador físic connectat a la càmera. Font: https://arxiv.org/pdf/2109.02119.pdf
Amb el popular pas de càmeres dedicades a sensors basats en mòbils, la presència del filtre polaritzador a la cultura popular s'ha reduït en gran mesura a la seva inclusió en ulleres de sol de qualitat raonable, on l'usuari pot observar les seves propietats que mata la reflexió inclinant el seu punt de vista o canviant el seu punt de vista. punt de vista sobre l'objecte reflexiu.
La llum solar és dispersa per molècules d'oxigen i nitrogen, amb la llum blava més àmpliament dispersa que altres longituds d'ona, fent que el blau sigui el color natiu d'un cel clar durant el dia. La llum blava està polaritzada, i a lineal o circular La lent polaritzada pot eliminar eficaçment aquesta llum polaritzada, eliminant els reflexos en el procés.
El document reconeix que els parabrises fumats podrien impedir o fins i tot impedir aquest mètode de veure l'interior del cotxe. Tanmateix, ja que això és limitada per la llei del Regne Unit, amb regulacions que varien segons l'estat dels EUA, el document no considera això com un obstacle principal.
YOLO
El sistema que proposa el document està pensat per integrar-se a la infraestructura cívica, com ara les càmeres de vigilància a les carreteres instal·lades pel govern. Conscients dels possibles obstacles sobre el cost, els investigadors van provar diverses configuracions de sistemes de reconeixement d'objectes en diversos nivells de qualitat d'equips de captura i ofereixen un escenari de cost mínim on es podrien afegir filtres polaritzadors barats a les càmeres existents, amb tots els altres aspectes de la remot del sistema.
Es van provar quatre marcs de reconeixement d'objectes: You-Only-Look-Once (YOLO) versions 3 i 4; SSD xarxa base; R-CNN més ràpid, I CenterNet. En les proves, els resultats més precisos es van obtenir amb YOLO V3, utilitzant un flux de treball de dos passos que primer localitza la zona del parabrisa i després busca un dispositiu mòbil en aquest espai.
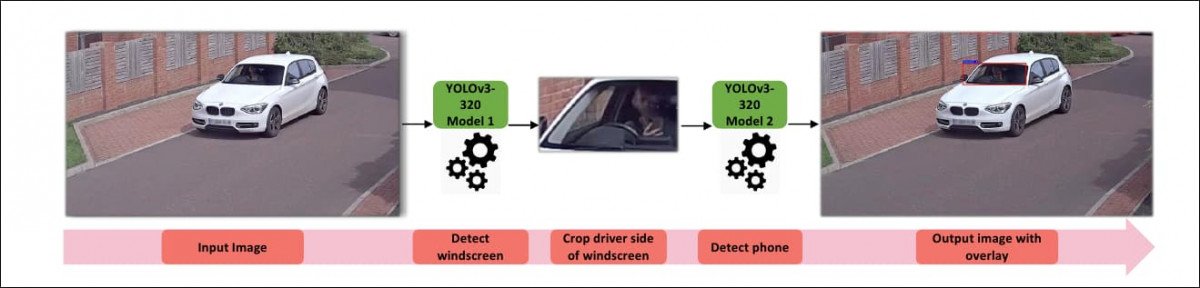
Tanmateix, la necessitat d'executar el vídeo a través de dues xarxes resulta en una velocitat de fotogrames menys que òptima de 13.15 fps, en comparació amb els 30 fps més propers al sistema més senzill. La qualitat dels resultats depèn de l'equip d'entrada, i els investigadors van trobar que quan l'entrada es dividia entre càmeres de gamma baixa i equips de major qualitat, era possible una taxa de precisió propera al 96% en el millor kit i el 74.35% en el més barat. càmeres.
Limitació d'infraccions reconegudes
A més de fer el sistema econòmicament viable, els investigadors estan preocupats per desenvolupar un sistema totalment automatitzat amb un mínim de supervisió humana necessària, i el sistema ha estat concebut per oferir multes automàticament. Tanmateix, atès que les lleis sobre l'ús del telèfon mòbil durant la conducció són cada cop més severes arreu del món, amb sancions que poden superar les simples multes o deduccions de punts de llicència (és a dir, al Regne Unit), sembla probable que la verificació humana casual segueixi sent un factor en el desplegament de tal sistema.

Malgrat l'ús del flux òptic i altres mètodes per tenir en compte la totalitat del contingut de vídeo, els algorismes de reconeixement d'objectes com YOLO consideren cada fotograma una "història completa" i el següent fotograma un projecte posterior. Per tant, s'ha d'evitar que un sistema d'aquesta naturalesa emeti (per exemple) 128 multes separades que cobreixin 128 fotogrames de vídeo de captura d'infraccions.
Per evitar-ho, el sistema incorpora l'algoritme de seguiment d'objectes CLASIFICACIÓ profund, que afegeix un "ID d'incident" únic a cada reconeixement d'infracció i garanteix que l'identificador no es dupliqui en fotogrames dins d'una seqüència de captura única.
Maneig de la vigilància nocturna
Per a condicions nocturnes, els investigadors utilitzen per defecte la captura d'infrarojos, tal com s'utilitza en projectes d'investigació anteriors que investiguen el mateix repte. Van provar longituds d'ona IR de 850 i 730 nanòmetres i van trobar que els millors detalls es van capturar amb 730 nm.

El document afirma que cal investigar més per determinar fins a quin punt es podria utilitzar la captura d'infrarojos durant les condicions diürnes.
dades
Per a la versió més econòmica d'un sol pas del sistema, els investigadors van utilitzar 2,235 imatges de matrícules del Conjunt de dades d'imatges obertes de Google, i 2150 imatges d'estoc i de telèfons mòbils personalitzades. Com que era necessari incloure imatges de telèfons que tenien els conductors, 1,700 de les imatges de telèfons es van prendre específicament per al projecte.
El sistema de dos passos requeria l'anotació de 487 parabrises, utilitzats per entrenar el primer pas del procés, a més de les dades utilitzades en el procés d'un sol pas.
Com que no hi havia accés a la infraestructura oficial de vigilància viària, totes les imatges van ser preses per voluntaris per aproximar condicions similars.
Compromesos
Els resultats finals ofereixen una sèrie d'estàndards de precisió que s'haurien de compensar amb el cost d'implementació, amb equips de captura i resultats de processament superiors que ofereixen la màxima precisió i, possiblement, una precisió "acceptable" que es pot obtenir mitjançant una adaptació econòmica dels equips de vigilància urbana existents. .

La canonada d''un sol pas' més barata aconsegueix una precisió propera al 75%, amb els costos d'implementació més baixos (és a dir, la instal·lació d'un filtre polaritzador barat), mentre que el sistema més complex de dos passos (que aïlla la zona del parabrisa abans de buscar un dispositiu mòbil que té el conductor) aconsegueix taxes de precisió més altes, però pot ser que només sigui adequat per a noves infraestructures, depenent del pressupost disponible. En ambdós casos, la qualitat dels equips de captura és una variable addicional.
Com s'ha assenyalat anteriorment, la percepció dels investigadors de la viabilitat del projecte sembla estar informada per la suposició que el sistema hauria de funcionar de manera totalment autònoma, un requisit qüestionable.
Mireu el vídeo oficial del projecte a continuació per obtenir més detalls sobre la implementació i els enfocaments utilitzats.














 |